ARS
Autonomous Remote Sensing

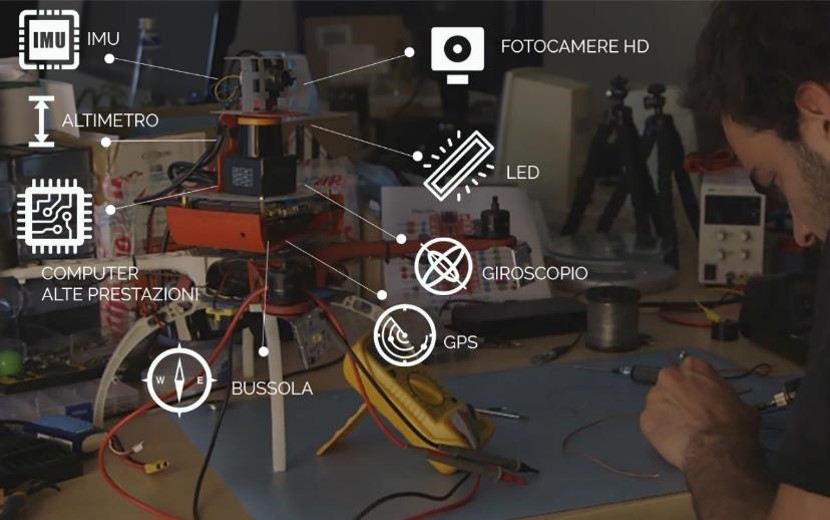
Remote sensor technologies and data acquisition by drone, for autonomous missions in confined spaces.
Goal
The project aims to implement the adoption of “remote sensing” techniques through the use of UAV (unmanned aerial vehicles) for autonomous or semi-autonomous inspection of confined spaces, for monitoring infrastructures and tunnels.
Target markets
Inspection and maintenance of civil infrastructure.
Start
2017
Time
24 Months
Type
Industrial research and / or experimental development projects
Partner altri poli
GD Test
Project value
€ 761.840
Call
Project included in the strategic research agenda 2016 of the ICT Innovation Pole, funded under the 2016 "Innovation Poles" Call, Line A, POR FESR 2014-2020 of Piedmont and carried out with the help of resources from the European Development Fund Regional (ERDF), the Italian State and the Piedmont Region.
Expected result
The project will allow the most appropriate techniques to be integrated into the drone, such as Light Detection and Ranging (LiDAR), which provides the opportunity to accurately detect any infrastructure problems. In addition, high resolution images can complete the observation by providing three-dimensional tracing capabilities of surfaces even in motion.
Why is it innovative?
- Autonomous / semi-autonomous navigation in confined spaces
- 3D mapping of the explored environment
- Data collection for inspection purposes
- Data muling (interfacing to sensors)


Who uses it and how does it change people’s lives?
- Temporal reduction of human presence underground or in confined spaces
- Massive information retrieval in a fraction of time compared to traditional techniques
- The mapping and inspection tasks of an infrastructure can be performed by a single tool
- 360 ° scanning of objects as the UAV can navigate the tunnel from different angles and inspect places that are difficult to access
- Data recovery from sensors where communication is absent